法国LEOSPHERE公司生产的WINDCUBE系列多普勒激光测风雷达利用激光回波信号的多普勒频移信息可获得高时空分辨率、高精度的三维风场数据。自2004年成立至今,LEOSPHERE在全球范围内已经设计、生成和安装使用了超过400台激光雷达系统,系统被广泛应用在各种环境条件下。

仪器原理
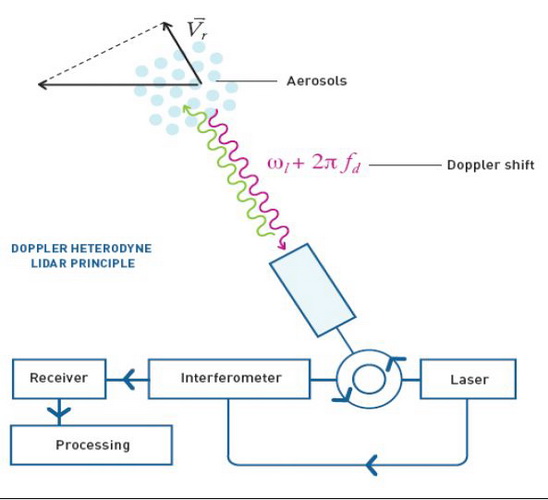
测风激光雷达是根据多普勒效应并采用外差分析法进行风速测量的仪器。激光器向大气中发射激光脉冲信号,脉冲传播过程中遇到运动中的悬浮颗粒物并产生多普勒频移现象,该频移量与颗粒物径向风速成一定比例关系。通过分析后向散射回波信号的中的频移量可计算径向风速风向,提供对流层中云层和气溶胶层定位和监测,输出大气边界层高度信息。
LEOSPHERE已推出三款多普勒测风激光雷达,可提供距系统3 km (WINDCUBE 100s),6 km (WINDCUBE 200s)和10 km (WINDCUBE 400s)范围的风场信息。
产品优势
★采用先进的脉冲式激光器
★ 结构紧凑轻便,易于运输安装,维护成本低
★系统轻便、稳定,可实现无人值守
★室外快速安装启动(90分钟)
★ 高时空分辨率测风数据(三维风场图),数据准确可靠
★可适应多种恶劣环境,IP65防护等级(防水、耐盐雾腐蚀)
★灵活的系统监控软件
应用领域
★机场空中交通优化——风切变、微下击暴流、低空急流、晴空湍流、尾迹涡流探测
★风能利用——风场选址和风车功率曲线校准
★空气污染——污染源追踪、烟羽扩散监测
★工业安全——化工厂/核电厂污染物扩散监测
★大气研究——边界层动力、边界层结构和高度探测
★气象气候——中尺度国家级别大气监测网络组建、大气状况监测和研究
|
性能
|
WINDCUBE 100s / 200s / 400s |
|
|
测量范围
|
WINDCUBE 100s:3 km(100m空间分辨率,1s积分时间) WINDCUBE 200s:6 km(100m空间分辨率,1s积分时间) WINDCUBE 400s:10 km(200m空间分辨率,1s积分时间) |
|
|
测量积分时间
|
0.5-10 s (默认积分时间为1s,积分时间越长,空间分辨率可以越小) |
|
|
空间分辨率
|
WINDCUBE 100s/200s:可选25 m, 50 m, 75 m, 100 m WINDCUBE 400s:可选75 m,100m,150m,200 m |
|
|
风速精度
|
优于0.5 m/s
|
|
|
径向风速范围
|
-30 m/s - 30 m/s
|
|
|
运行和模式
|
WINDCUBE 100s / 200s / 400s |
|
|
方位角范围
|
0°- 360°
|
|
|
仰角范围
|
-10°- 190°
|
|
|
最大转动速度
|
30°/s (精度:0.1°)
|
|
|
扫描模式
|
PPI:恒定天顶角模式 RHI:恒定方位角模式 |
DBS:垂直廓线 LOS:固定位置连续观测 |
|
硬件和使用环境
|
WINDCUBE 100s / 200s / 400s |
|
|
尺寸
|
长-宽-高:1008×814×1365 mm (包含扫描头和仪器支架) |
|
|
重量
|
232 kg
|
|
|
操作条件
|
温度范围:-25℃至+45℃(含空调/加热模块) 湿度范围:10%至100% |
|
|
激光源
|
脉冲式 @ 1.54 μm
|
|
|
激光人眼安全等级
|
激光等级:1M级,符合IEC/EN 60825-1激光产品安全要求 及ANSI-Z136.1-2007美国激光安全使用标准 |
|
|
功耗
|
500 W - 1,600 W
|
|
|
软件和数据
|
WINDCUBE 100s / 200s / 400s |
|
|
数据格式
|
ASCII / BUFR
|
|
|
通讯方式
|
Ethernet / LAN
|
|
|
数据输出
|
GPS定位/时间
扫描器位置
特定时间内径向风速平均值
信噪比
|
风速离散
DBS模式下风场重建
后散射信号
原始信号的平均数据频谱
|